// All Projects
AI / Prompt Engineering · 2025
Three-GPT system walking job seekers from live job research through targeted practice questions to coached answers. Integrates the Wikipedia REST API as an external Action, uses inter-chat prompt chaining, and applies layered prompt defenses across all three GPTs.

Robotics · Fall 2020
Leader-follower simulation in Gazebo with Neato robots. Followers use OpenCV and a fuzzy logic controller to maintain formation behind a tele-op leader.
Robotics · Fall 2020
Particle filter algorithm to localize a robot in Gazebo. LIDAR data builds a particle cloud; particles are resampled by probability and propagated through motion.
Computer Vision · Fall 2020
Extracts a contour from an image, converts it to waypoints, and navigates a robot through them using a custom detection and reordering algorithm.
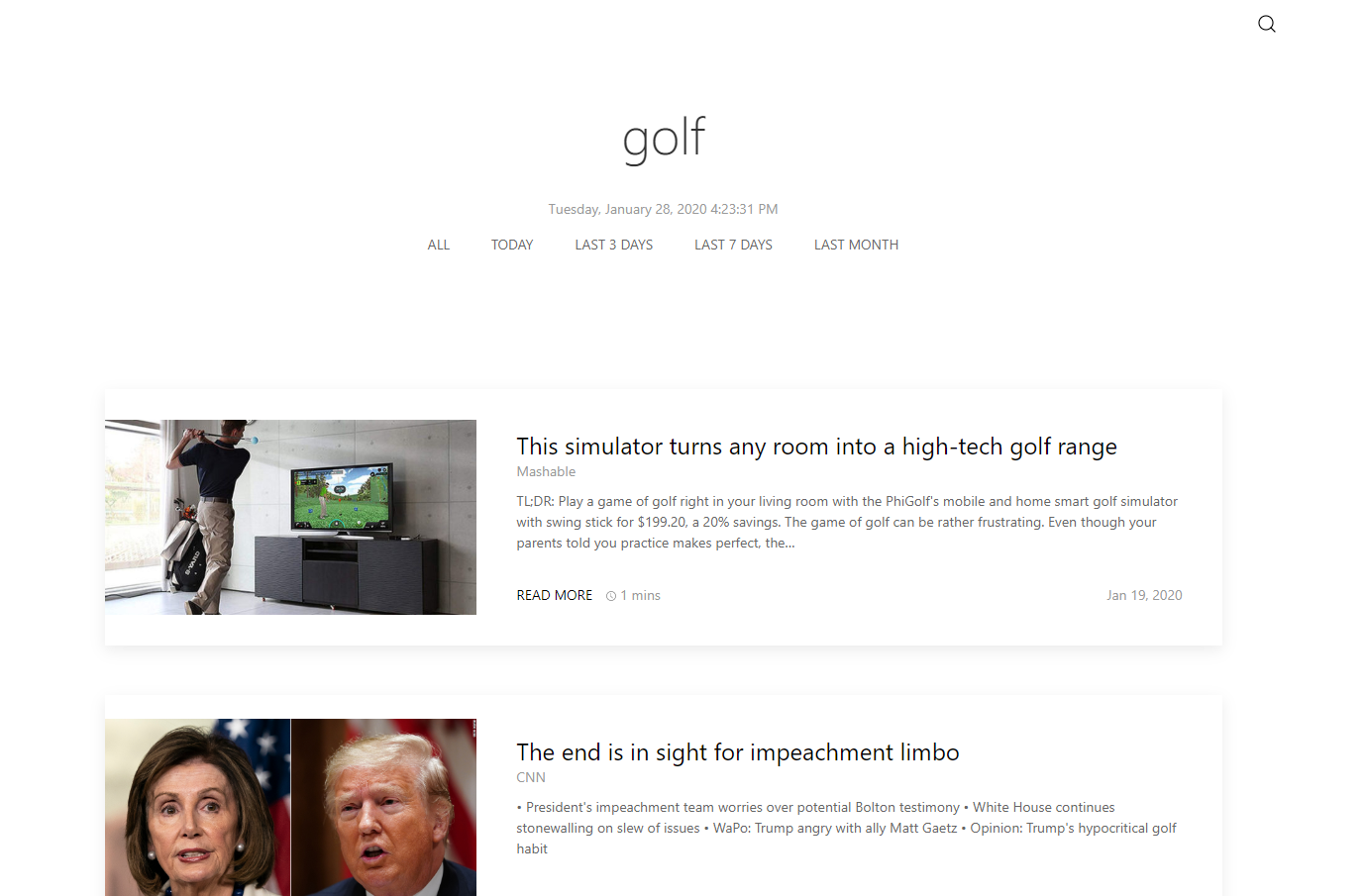
Personal Project · Spring 2020
Web app aggregating news articles via News API with keyword and category search. Displays articles with summaries and estimated reading times.
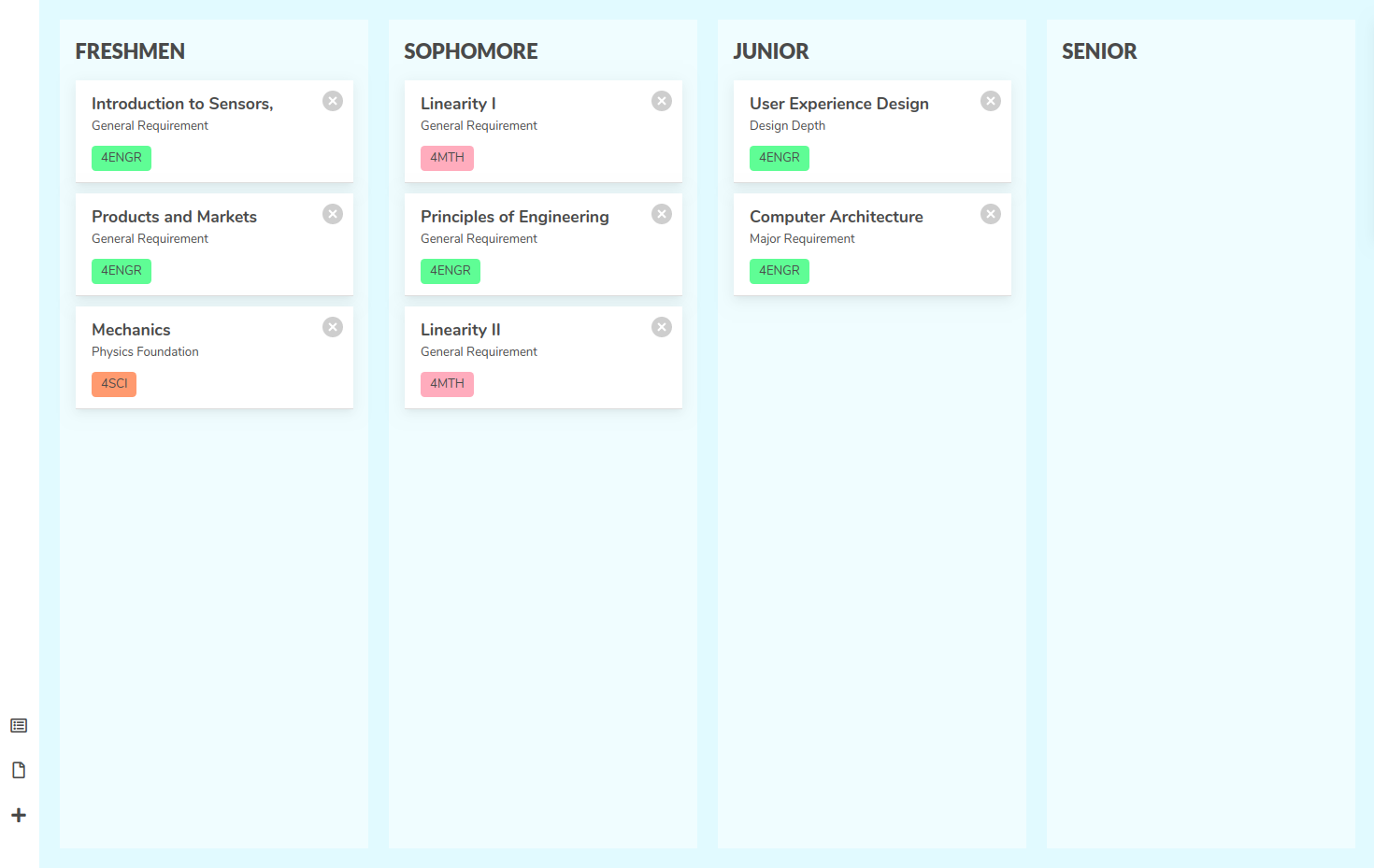
Personal Project · Fall 2019
Visual course planner for Olin College. A MEAN stack dashboard with four-year columns and draggable course cards mapped to degree requirements.
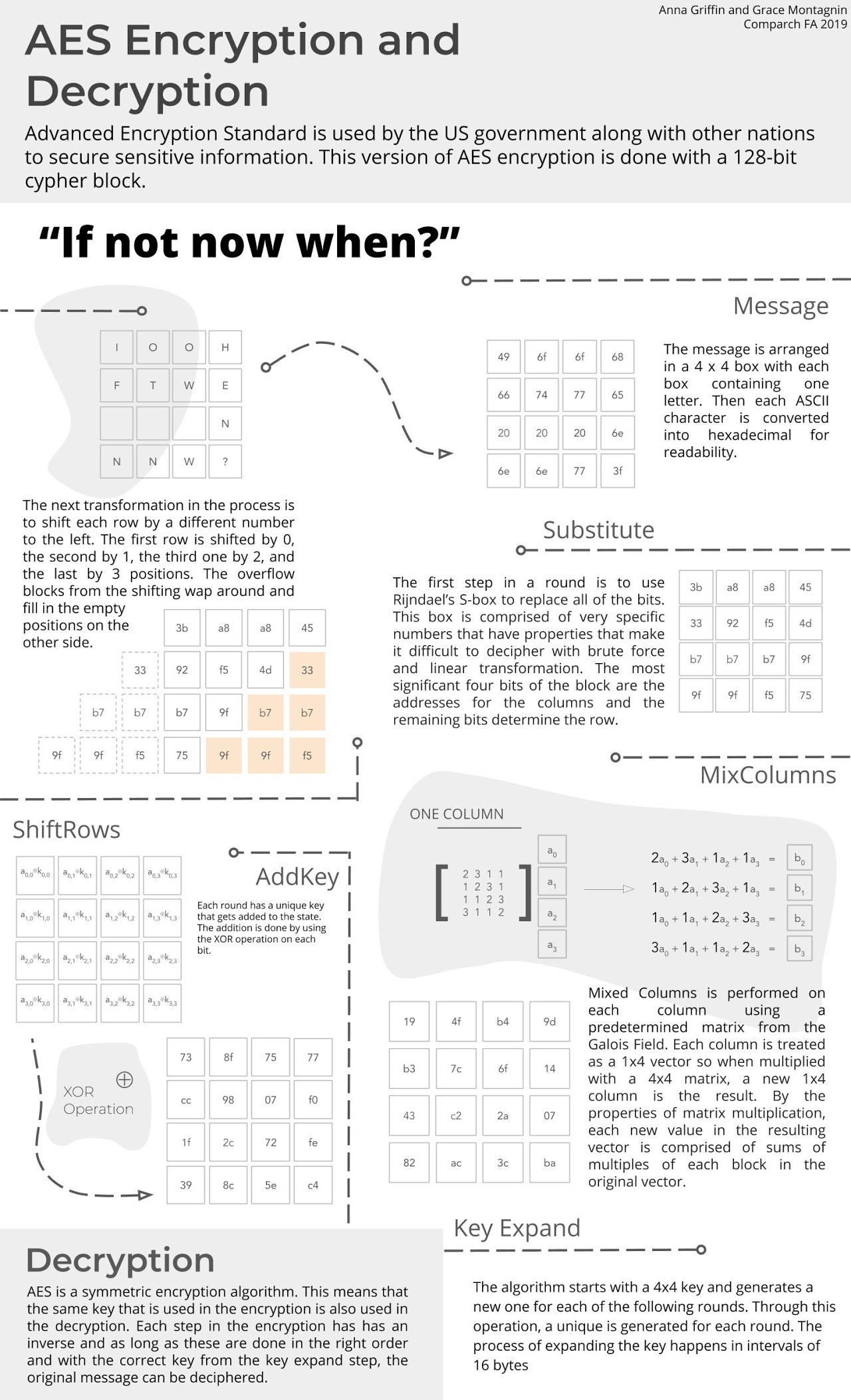
Computer Architecture · Fall 2019
128-bit AES cipher implemented in Verilog, supporting both encryption and decryption. Built to explore hardware-level cryptographic standards.
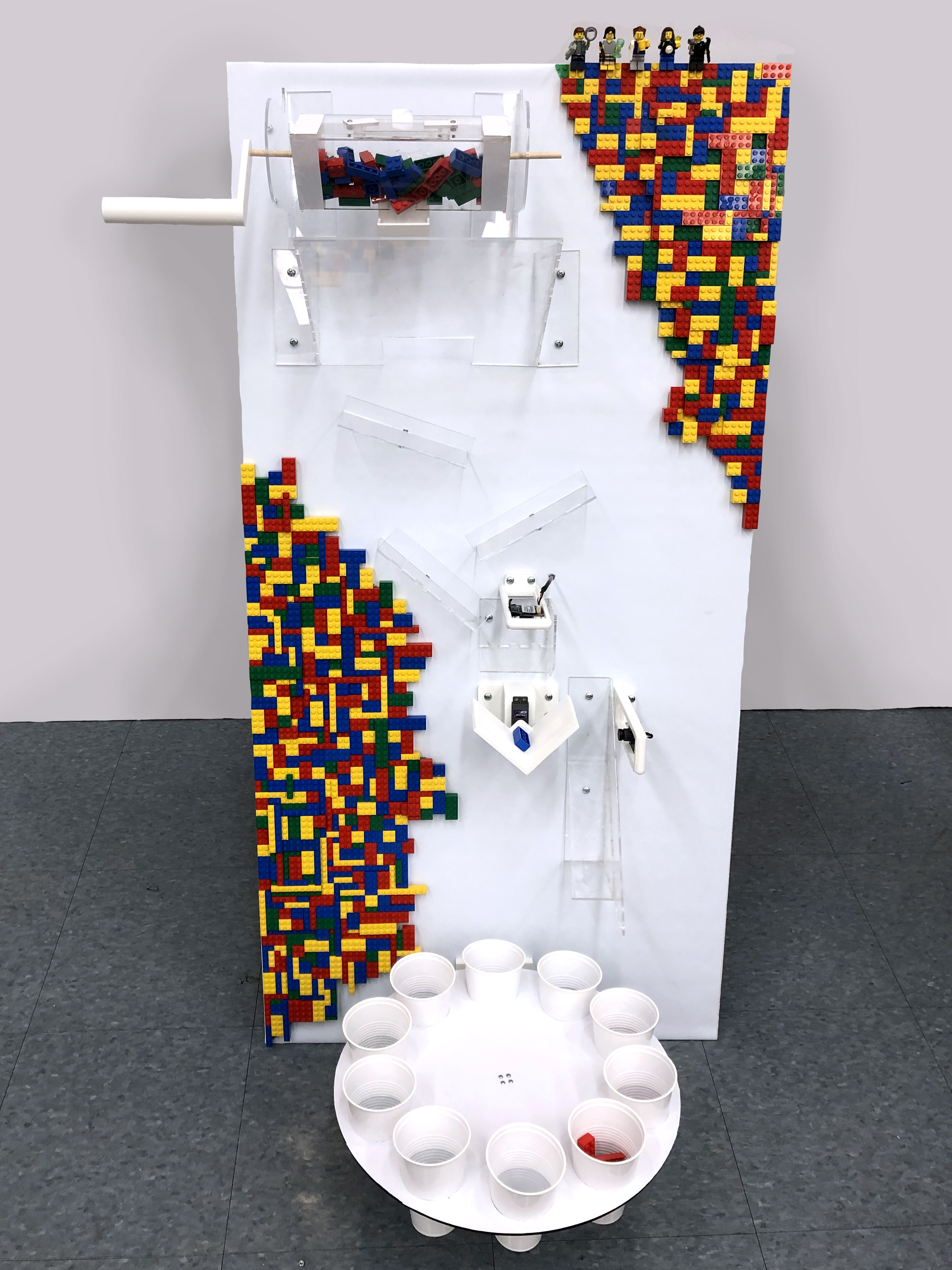
Principles of Engineering · Fall 2018
Automatic LEGO sorter detecting size, shape, and color with OpenCV. Arduino-controlled motors and servos performed physical sorting based on classification.
Software Design · Spring 2018
Multi-user web app to track time spent on activities. Built with Flask, supporting user accounts and persistent progress saving.
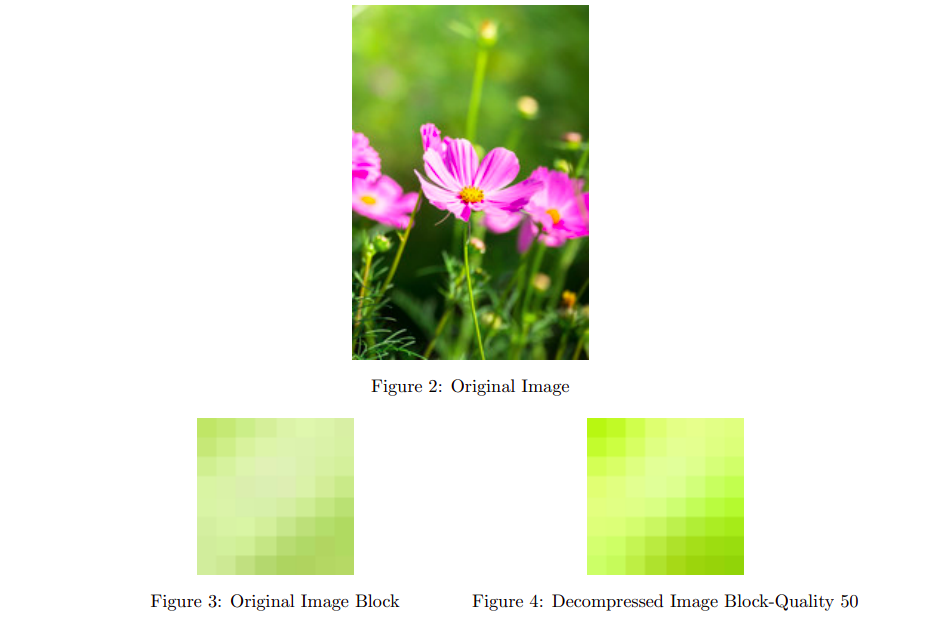
Linearity I · Spring 2018
Co-authored paper and implemented a Python script explaining JPEG compression using DCT and Huffman Encoding.
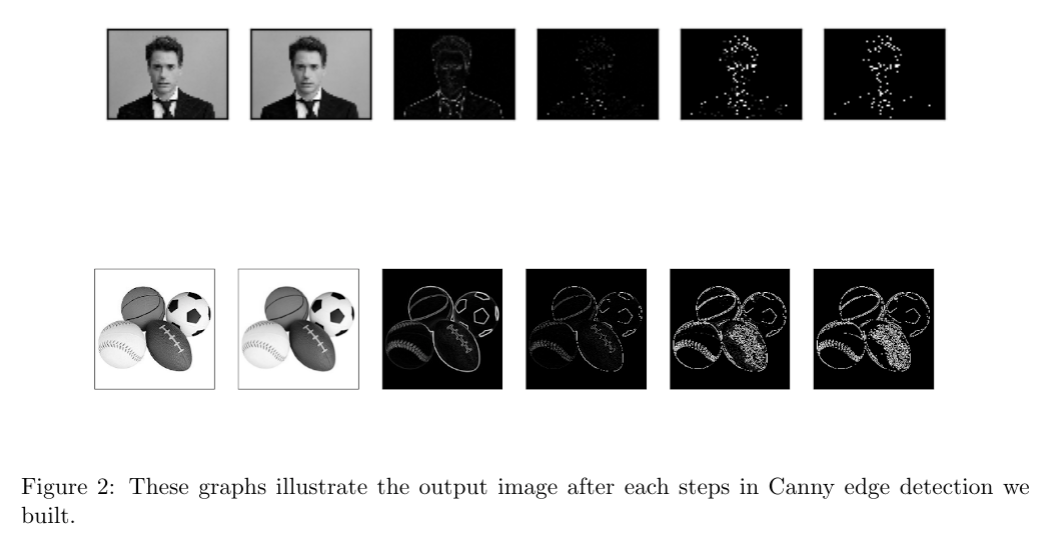
Linearity II · Spring 2018
Co-authored paper exploring edge detection approaches including first and second derivative methods, Fuzzy Logic, and the Canny edge detector.